using Catlab
using AlgebraicRewriting
@present OntColorBlocksworld(FreeSchema) begin
# Types
Block::Ob
Empty::Ob
Gripper::Ob
HasColor::Ob
IsClear::Ob
IsOnTable::Ob
HasLabel::Ob
Color::AttrType
Clear::AttrType
OnTable::AttrType
Label::AttrType
# Predicates
isEmpty::Hom(Empty, Block)
isHolding::Hom(Gripper, Block)
hasColor::Attr(HasColor, Color)
hasColorDom::Hom(HasColor, Block)
isClear::Attr(IsClear, Clear)
isClearDom::Hom(IsClear, Block)
isOnTable::Attr(IsOnTable, OnTable)
isOnTableDom::Hom(IsOnTable, Block)
hasLabel::Attr(HasLabel, Label)
hasLabelDom::Hom(HasLabel, Block)
# Relations
On::Ob
onL::Hom(On, Block)
onR::Hom(On, Block)
end
# Create a C-set type based on ontology
@acset_type ColorBlocksworld(OntColorBlocksworld)Sequential, Hierarchical, and Analogical
Plan Transfer in Robotics
Doctoral Defense
Department of Computer Science
University of Maryland, College Park
December 2, 2024
About Me
Ph.D. Candidate in Computer Science at University of Maryland, College Park
- Since 2018
- Topos Institute (Research Associate), NIST, Siemens
Research Staff Member at the Johns Hopkins University Applied Physics Laboratory
- Since 2017
- Sponsors: CDC, NASA, FEMA, Army National Guard, …
Previously B.S. and M.S. Electrical Engineering from Drexel University in Philadelphia, PA in 2017


\[ \newcommand{\N}{\mathbb{N}} \newcommand{\R}{\mathbb{R}} \newcommand{\cat}[1]{\mathsf{#1}} \newcommand{\CAT}[1]{\mathsf{#1}} \newcommand{\Set}{\CAT{Set}} \DeclareMathOperator{\Path}{Path} \newcommand{\catSet}[1]{\cat{#1}\text{-}\Set} \DeclareMathOperator{\Ob}{Ob} \DeclareMathOperator{\Hom}{Hom} \]
Let’s take an example
Agility Robotics (left) and Brightpick Robot (right) showcased during ProMat 2023
Humanoid robot
Arms
Bins
Conveyer Belt
Mobile robot
Lift
Box

Problem: Designing planning problems and running planners is time-consuming.
(Alnazer and Georgievski 2023) (Ingrand and Ghallab 2017)
What do I mean by transferring plans?
![]()
- Transfers whole plans or individual actions
- Can be executed in sequence with other plans
- Preserves high-level behavior
- Can be adapted to a new environment
Potential Applications

Interoperability in Mission Planning
Transferring the course of action (CoA) for a supply distribution plan from one disaster scenario to another.

Standards and Privacy in Manufacturing
Transferring an abstract, standardized plan and adapting it with manufacturer-specific details
Section 8.4 in (Aguinaldo 2024)
What is planning in robotics?
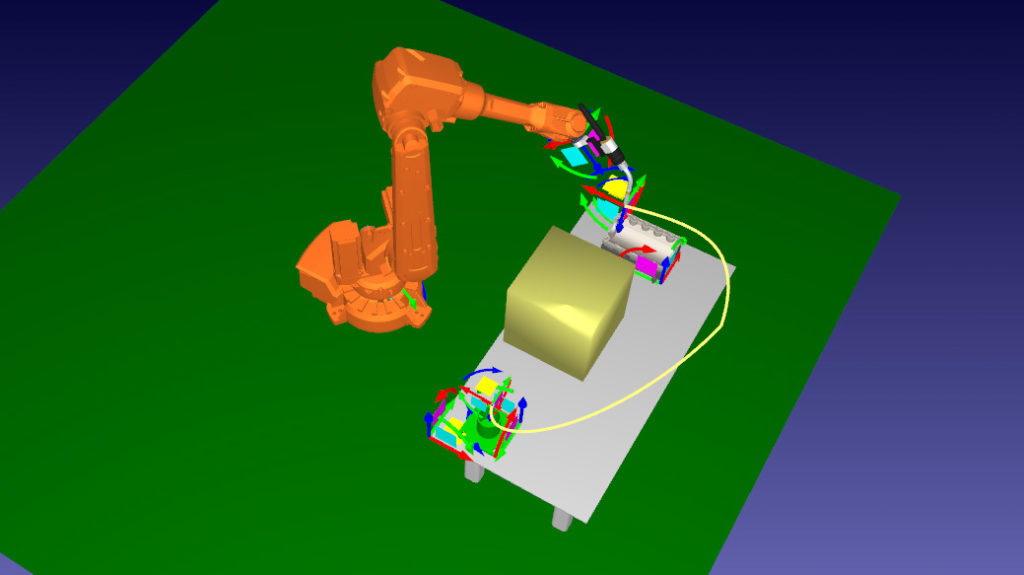
Task Planning
Motion Planning
Abstract decision-making
Symbolic states
Discrete action space
Algorithmic search
AI Planning
Physical maneuver
Geometric states
Continuous configuration space
Robot kinematics and dynamics
Robotics
1970s - 2000s
Image creds: Gerhard Wickler (task), RoboDK (motion)
What is planning in robotics?
Task Planning
Motion Planning
Abstract decision-making
Symbolic states
Discrete action space
Algorithmic search
AI Planning
Physical maneuver
Geometric states
Continuous configuration space
Robot kinematics and dynamics
Robotics
(after 2010) Task and Motion Planning (TAMP)
Coordinating high-level and low-level planning
(Kaelbling and Lozano-Pérez 2011), (Garrett et al. 2021), (Mansouri, Pecora, and Schüller 2021)
Image creds: Gerhard Wickler (task), RoboDK (motion)
What is plan transfer in robotics? (today)
Transfer learning is the process of reusing knowledge, e.g. models, trained in one domain in another domain:
- feature spaces or distributions in machine-learning (Pan and Yang 2009)
- state or action spaces in reinforcement learning (RL) (Taylor and Stone 2009)
- robot (embodiment), task, or environment in robotics (Jaquier et al. 2023)
Some techniques in robotics include:
learning a shared feature space across different environments (universal domain adaptation),
learning multiple tasks at once (RL meta-learning), and
learning mapping between different kinematic structures (motion retargeting).
![]()
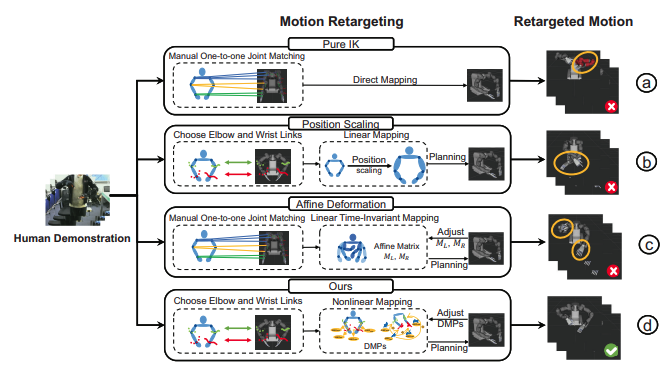
Chapter 2 in (Aguinaldo 2024)
What is category theory?
Category theory (Eilenberg and MacLane 1945) is often referred to as the “mathematics of mathematics”.
Connects different areas of mathematics by studying the relationships between structures.
Category theory has been applied in many domains outside mathematics1, and such works contribute to the field of Applied Category Theory (ACT).


Definition: (Category) A category, \(\cat{C}\), consists of:
- a collection of objects, \(\text{Ob}(\cat{C})\)
- a collection of morphisms for every pairs of objects, \(\text{Hom}_\cat{C}(X,Y)\) for \(X, Y \in \text{Ob}(\cat{C})\)
- a composition operation, if \(f: X \rightarrow Y\), \(g: Y \rightarrow Z\) then \(g \circ f: X \rightarrow Z\)
- an identity morphism for every object, \(1_X: X \rightarrow X\)
satisfying the associativity law \(h \circ (g \circ f) = (h \circ g) \circ f\) and unitality laws \(f \circ 1_x = f\) and \(1_y \circ f = f\) whenever these equations make sense.
Chapter 3 in (Aguinaldo 2024)
Functors and natural transformations

Functors map, e.g. \(\; F: \cat{P(\{1,2\})} \rightarrow \cat{\mathbb{N}_{\leq}}\):
- Objects to objects
- Morphisms to morphisms
- Preserves composition in the source category
Chapter 3 in (Aguinaldo 2024)
Functors and natural transformations
![]()
Functors map, e.g. \(\; F: \cat{P(\{1,2\})} \rightarrow \cat{\mathbb{N}_{\leq}}\):
- Objects to objects
- Morphisms to morphisms
- Preserves composition in the source category
Natural transformations map functors, e.g. \(\alpha: F \rightarrow G\):
- Defines morphism in target category, \(\cat{\mathbb{N}_{\leq}}\), per object in source category, e.g. \(\cat{P(\{1,2\})}\)
- Preserves composition in the source category
Chapter 3 in (Aguinaldo 2024)
Monoidal Categories and String Diagrams
Informal Definition: (Monoidal Category)
A monoidal category, \(\cat{M}\), consists of:
- a collection of objects, \(\text{Ob}(\cat{M})\)
- a collection of morphisms for every pairs of objects, \(\text{Hom}_\cat{M}(X,Y)\) for \(X, Y \in \text{Ob}(\cat{M})\)
- a composition operation, if \(f: X \rightarrow Y\), \(g: Y \rightarrow Z\) then \(g \circ f: X \rightarrow Z\)
- an identity morphism for every object, \(1_X: X \rightarrow X\)
- a monoidal product, \(\otimes: \cat{M} \times \cat{M}\)
- a unit object, \(1 \in \cat{M}\)
satisfying the associativity law \(h \circ (g \circ f) = (h \circ g) \circ f\) and unitality laws \(f \circ 1_x = f\) and \(1_y \circ f = f\) whenever these equations make sense.
other laws…
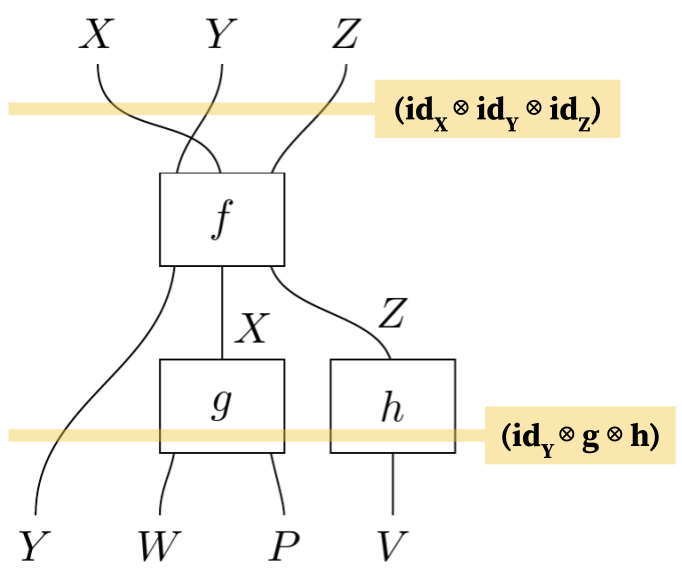
An example string diagram
(Master et al. 2020), (Abramsky and Coecke 2008), (Selinger 2010), (Breiner, Jones, and Subrahmanian 2016)
Chapter 3 in (Aguinaldo 2024)
My conceptual framework for plan transfer
Sequential Transfer

Like motion primitives and skills (Bøgh et al. 2012), (Ionescu 2020), (Proctor et al. 2016), Section 2.2 in (Aguinaldo 2024)
- Valid composition
- Same planning domain
Hierarchical Transfer

Like modular architectures (Cowley, Chaimowicz, and Taylor 2006) and middlewares (Aragão, Moreno, and Bernardino 2016), (Yang Liang 2008), (Matai et al. 2008), Section 2.3 in (Aguinaldo 2024)
- Preserves composition and abstract behavior
- Same planning domain
Analogical Transfer

Like robot program translation (Freund et al. 2001), (Freund and Luedemann-Ravit 2002), (Adam et al. 2017), (Ringert et al. 2014), (Souza et al. 2019), (Carvalho de Souza et al. 2020), Section 2.4 in (Aguinaldo 2024)
- Achieves analogous goal state
- Different planning domain
Chapter 1 in (Aguinaldo 2024)
My mathematical framework and case studies
Sequential Transfer
Key Insight: Propagate preconditions and effects to check plan composition
Tools: Symmetric monoidal categories (SMCs) (Joyal and Street 1991) and string diagrams (Marsden 2014)
Chapter 4 in (Aguinaldo 2024)
Hierarchical Transfer

Key Insight: Use functors to map high-level task abstractions to low-level abstractions
Tools: SMCs, monoidal functors, and functors (Leinster 2016)
Chapter 5 in (Aguinaldo 2024)
Analogical Transfer
![]()
Key Insight: Transfer whole plans using an ontological map between planning domains
Tools: \(\cat{C}\)-sets (David I. Spivak and Kent 2011), (Patterson, Lynch, and Fairbanks 2021), DPO rewriting (K. Brown et al. 2023), and functorial data migrations (David I. Spivak and Kent 2012)
Chapter 6 & 7 in (Aguinaldo 2024)
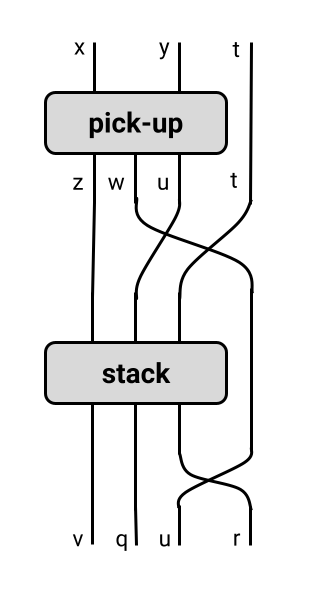
Sequential Transfer: An Overview
Strings diagrams can propagate preconditions and effects of actions in a plan to check plan composition. (Aguinaldo and Regli 2021)

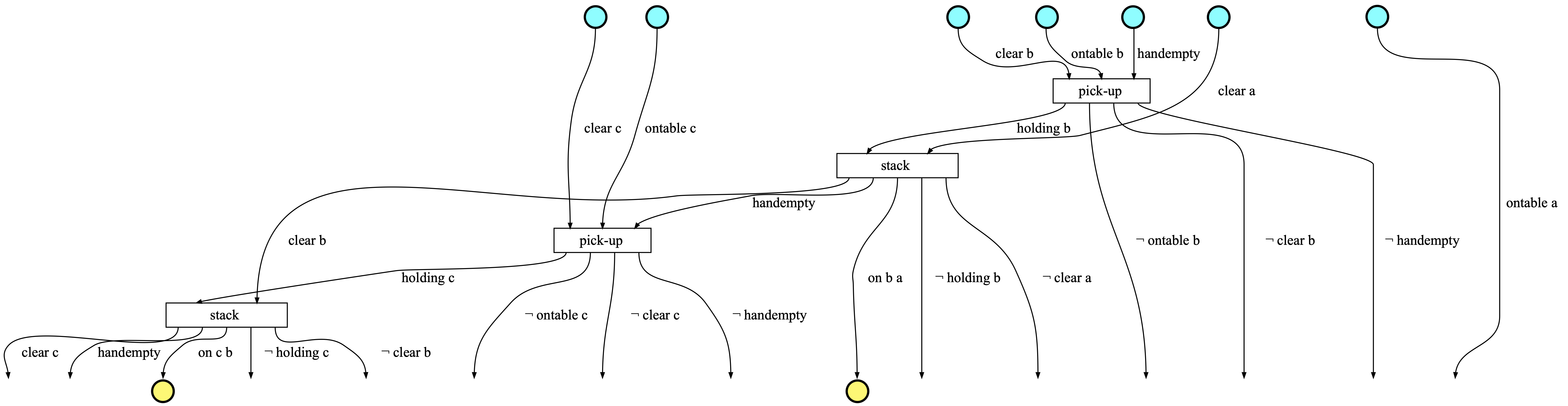
| State | World State | Action |
|---|---|---|
| Initial | clear c, ontable c, clear b, ontable b, handempty, clear a, ontable a | |
| Step 1 | clear c, ontable c, clear b, ontable b, handempty, clear a, ontable | pick-up |
| Step 2 | clear c, ontable c, holding b, clear a, ¬ontable b, ¬clear b, ¬handempty, ontable a | stack |
| Step 3 | clear b, clear c, ontable c, handempty, on b a, ¬holding b, ¬clear a, ¬ontable b, ¬clear b, ¬handempty, ontable a | pick-up |
| Step 4 | holding c, clear b, ¬ontable c, ¬clear c, ¬handempty, on b a, ¬holding b, ¬clear a, ¬ontable b, ¬clear b, ¬handempty, ontable a | stack |
| Goal | clear c, handempty, on c b, ¬holding c, ¬clear b, ¬ontable c, ¬clear c, ¬handempty, on b a, ¬holding b, ¬clear a, ¬ontable b, ¬clear b, ¬handempty, ontable a |
Chapter 4 in (Aguinaldo 2024)
Hierarchical Transfer: An Overview
The categories \(\cat{Task}\), \(\cat{Virtual}\), \(\cat{Motion}\) are defined. Functors,
\(F: \cat{Task} \rightarrow \cat{Virtual} \quad \quad G: \cat{Virtual} \rightarrow \cat{Motion}\)
can be used to guarantee that the structure in \(\cat{Task}\) is preserved. (Aguinaldo et al. 2021)
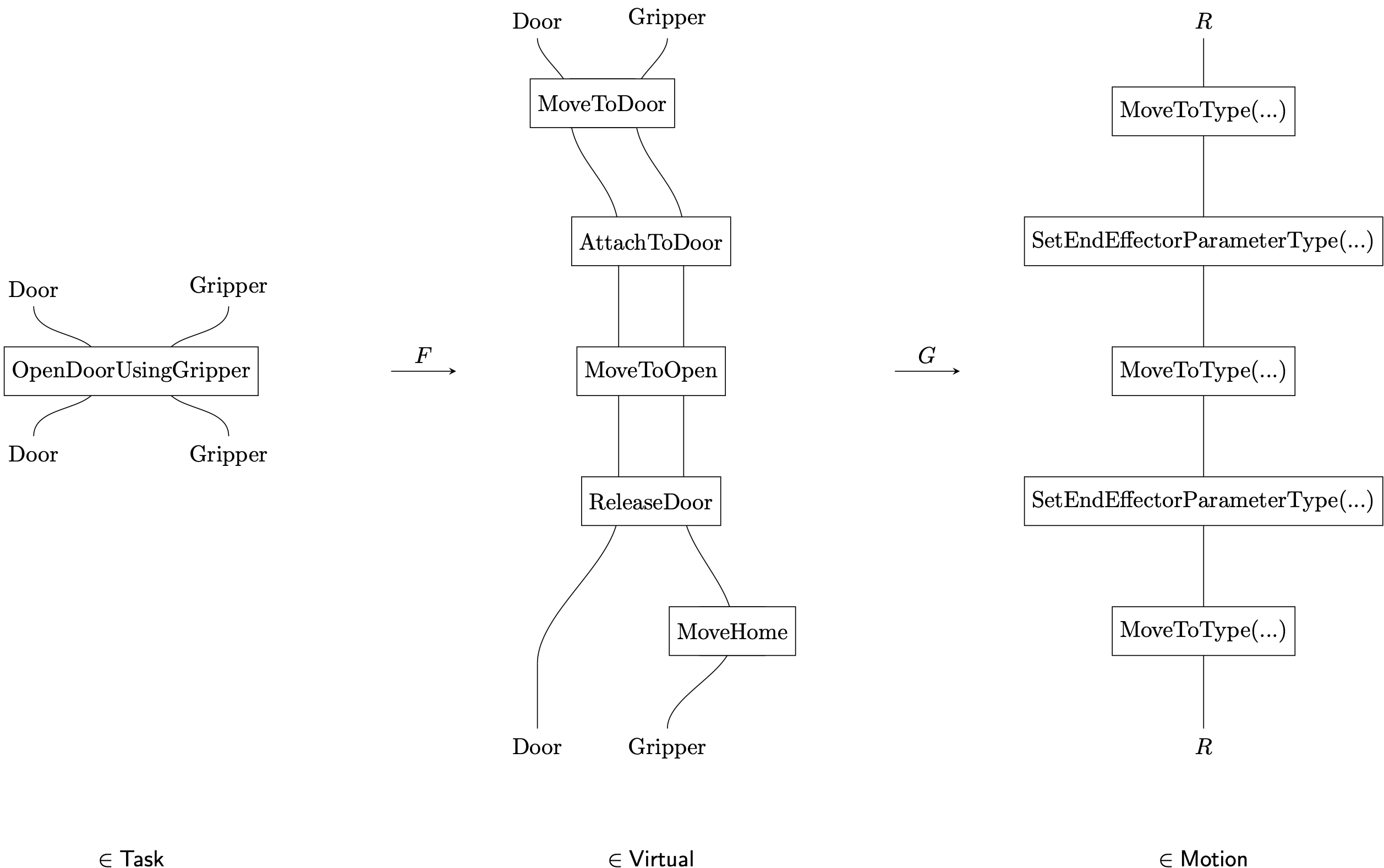
Chapter 5 in (Aguinaldo 2024)
What can we do with analogical plan transfer?
Kitchenworld simulation from AI2-Thor (Allen Institute for Artificial Intelligence 2024)
Why does this work?
Kitchenworld ontology derived from AI2-Thor Object Type Documentation
(Allen Institute for Artificial Intelligence 2024)
Uses an ontology alignment map that is functorial
Section 7.7 in (Aguinaldo 2024)
Formal Theory of Analogies
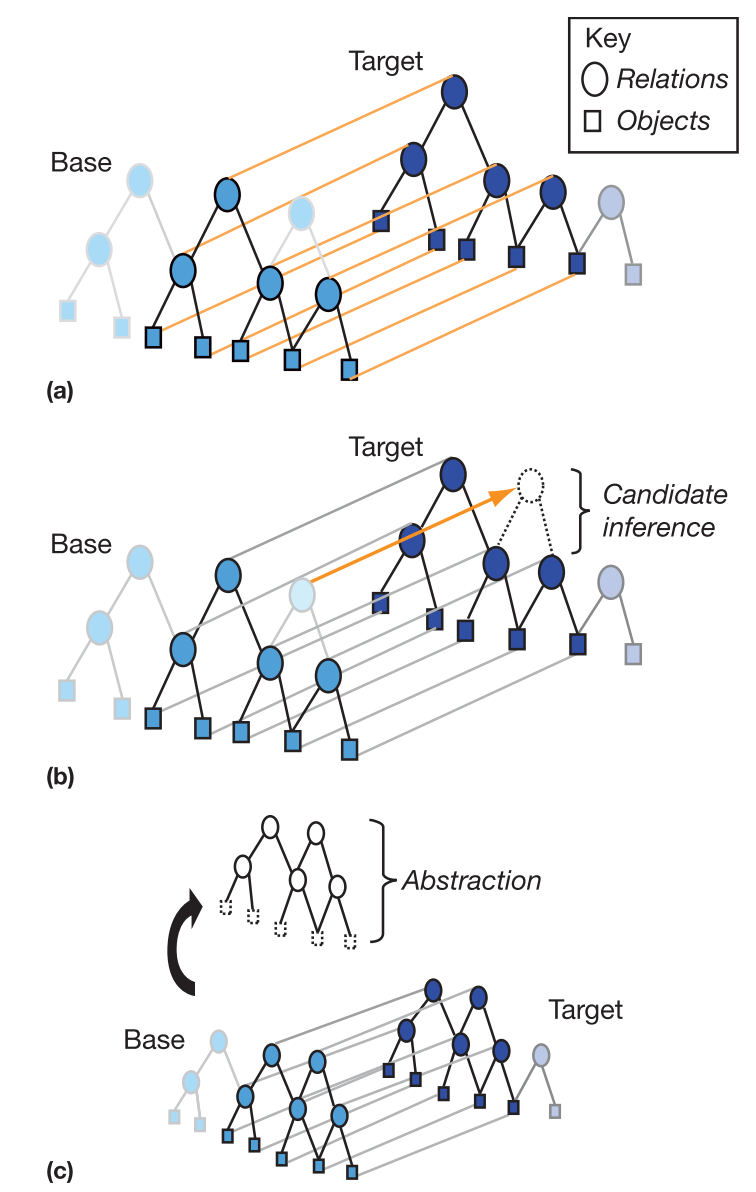
(Gentner and Smith 2012)
Why analogies?
(Wilkins and DesJardins 2001) argued that an ideal system should mimic human behavior by using analogies to transfer solutions from one problem to another.
What are analogies?
According to (Gentner 1983), analogies:
- have a one-to-one correspondence, each concept in the source domain maps to at most one concept in the target domain
- adhere to the systematicity principle, where analogical maps connect large, densely connected systems of concepts, instead of just a handful of isolated concepts
Definition: (Analogical Transfer) Analogical transfer involves identifying structural similarities, or analogies, between planning domains and leveraging these analogies to adapt plans from one context to another. (Aguinaldo 2024)
Chapter 7 in (Aguinaldo 2024)
Analogies with Task Planning
PDDL1 does not have built-in support for domain comparison or domain ontology alignment. Therefore, a new planning language that supports these capabilities is a prerequisite for analogical plan transfer. (Aguinaldo 2024)
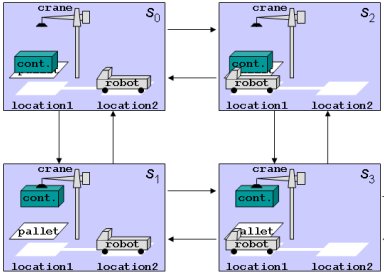
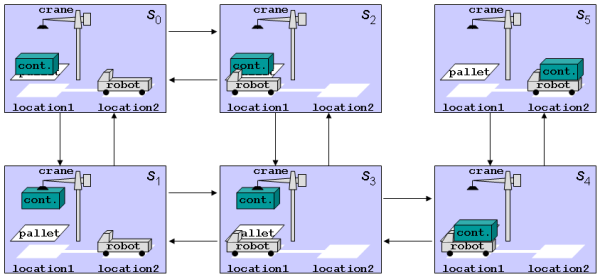
State Transition System Model for Planning
- States, \(S = \{s_0, s_1, s_2, \dots\}\) set of all possible states
- Actions, \(A = \{a_0, a_1, a_2, \dots\}\) set of all possible actions
- Preconditions, \(\mathrm{Pre}(a)\) conditions that must be true in the state for the action to be applied
- Effects, \(\mathrm{Eff}(a)\) conditions are true in the state after the action is applied
- Transition function, \(\gamma: A \times S \rightarrow S\) partial function that maps an action and a state to the resulting state
- Checking applicability an action \(a \in A\) is at state \(s \in S\) if \(\gamma(a, s)\) is defined
Chapter 6 in (Aguinaldo 2024)
Planning States as \(\cat{C}\)-sets
Definition: (\(\cat{C}\)-set, schema category) A \(\cat{C}\)-set is a functor from \(\cat{C} \rightarrow \cat{Set}\). \(\cat{C}\) is referred to as the schema category (i.e. ontology). \(\cat{Set}\) is a category whose objects are sets and whose morphisms are set function maps.
Example (Section 6.4.1 in (Aguinaldo 2024)):
A \(\cat{C}\)-set, \(X\), that stores data about what boxes are on which surface.
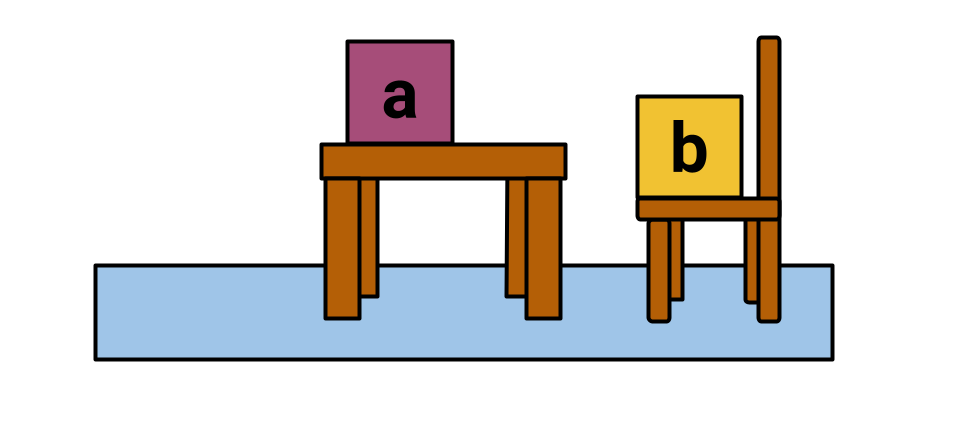

The category of elements construction (Riehl 2016) makes \(X\) interoperable with RDF triple syntax (subject, predicate, object), facilitating its use in knowledge graphs (David I. Spivak and Kent 2012).
\(\cat{ColorBlocksworld}\)-set in Code

state = @acset_colim yColorBlocksworld begin
gripper::Gripper
empty::Empty
null::Block
isHolding(gripper) == null
isEmpty(empty) == null
(labelNull)::HasLabel
hasLabelDom(labelNull) == null
hasLabel(labelNull) == "null"
(A, B, C, D, E, F)::Block
(colorA, colorB, colorC, colorD, colorE, colorF)::HasColor
hasColorDom(colorA) == A
hasColorDom(colorB) == B
hasColorDom(colorC) == C
hasColorDom(colorD) == D
hasColorDom(colorE) == E
hasColorDom(colorF) == F
hasColor(colorA) == "green"
hasColor(colorB) == "red"
hasColor(colorC) == "yellow"
hasColor(colorD) == "purple"
hasColor(colorE) == "purple"
hasColor(colorF) == "blue"
(labelA, labelB, labelC, labelD, labelE, labelF)::HasLabel
hasLabelDom(labelA) == A
hasLabelDom(labelB) == B
hasLabelDom(labelC) == C
hasLabelDom(labelD) == D
hasLabelDom(labelE) == E
hasLabelDom(labelF) == F
hasLabel(labelA) == "A"
hasLabel(labelB) == "B"
hasLabel(labelC) == "C"
hasLabel(labelD) == "D"
hasLabel(labelE) == "E"
hasLabel(labelF) == "F"
(x1, x2)::On
onL(x1) == E
onR(x1) == D
onL(x2) == D
onR(x2) == C
(clearA, clearB, clearC, clearD, clearE, clearF)::IsClear
isClearDom(clearA) == A
isClearDom(clearB) == B
isClearDom(clearC) == C
isClearDom(clearD) == D
isClearDom(clearE) == E
isClearDom(clearF) == F
isClear(clearA) == true
isClear(clearB) == true
isClear(clearC) == false
isClear(clearD) == false
isClear(clearE) == true
isClear(clearF) == true
(onTableA, onTableB, onTableC, onTableD, onTableE, onTableF)::IsOnTable
isOnTableDom(onTableA) == A
isOnTableDom(onTableB) == B
isOnTableDom(onTableC) == C
isOnTableDom(onTableD) == D
isOnTableDom(onTableE) == E
isOnTableDom(onTableF) == F
isOnTable(onTableA) == true
isOnTable(onTableB) == true
isOnTable(onTableC) == true
isOnTable(onTableD) == false
isOnTable(onTableD) == false
isOnTable(onTableE) == false
isOnTable(onTableF) == true
end
pretty_tables(state)┌───────┬─────────┐
│ Empty │ isEmpty │
├───────┼─────────┤
│ 1 │ 1 │
└───────┴─────────┘
┌─────────┬───────────┐
│ Gripper │ isHolding │
├─────────┼───────────┤
│ 1 │ 1 │
└─────────┴───────────┘
┌──────────┬─────────────┬──────────┐
│ HasColor │ hasColorDom │ hasColor │
├──────────┼─────────────┼──────────┤
│ 1 │ 2 │ green │
│ 2 │ 3 │ red │
│ 3 │ 4 │ yellow │
│ 4 │ 5 │ purple │
│ 5 │ 6 │ purple │
│ 6 │ 7 │ blue │
└──────────┴─────────────┴──────────┘
┌─────────┬────────────┬─────────┐
│ IsClear │ isClearDom │ isClear │
├─────────┼────────────┼─────────┤
│ 1 │ 2 │ true │
│ 2 │ 3 │ true │
│ 3 │ 4 │ false │
│ 4 │ 5 │ false │
│ 5 │ 6 │ true │
│ 6 │ 7 │ true │
└─────────┴────────────┴─────────┘
┌───────────┬──────────────┬───────────┐
│ IsOnTable │ isOnTableDom │ isOnTable │
├───────────┼──────────────┼───────────┤
│ 1 │ 2 │ true │
│ 2 │ 3 │ true │
│ 3 │ 4 │ true │
│ 4 │ 5 │ false │
│ 5 │ 6 │ false │
│ 6 │ 7 │ true │
└───────────┴──────────────┴───────────┘
┌──────────┬─────────────┬──────────┐
│ HasLabel │ hasLabelDom │ hasLabel │
├──────────┼─────────────┼──────────┤
│ 1 │ 1 │ null │
│ 2 │ 2 │ A │
│ 3 │ 3 │ B │
│ 4 │ 4 │ C │
│ 5 │ 5 │ D │
│ 6 │ 6 │ E │
│ 7 │ 7 │ F │
└──────────┴─────────────┴──────────┘
┌────┬─────┬─────┐
│ On │ onL │ onR │
├────┼─────┼─────┤
│ 1 │ 6 │ 5 │
│ 2 │ 5 │ 4 │
└────┴─────┴─────┘Uses category theory programming framework provided by AlgebraicJulia
Actions in \(\catSet{ColorBlocksworld}\) in Code
unstack action span written in AlgebraicJulia
unstack = @migration SchRule OntColorBlocksworld begin
L => @join begin
gripper::Gripper
empty::Empty
(block, underblock, null)::Block
isEmpty(empty) == null
o::On
onL(o) == block
onR(o) == underblock
isHolding(gripper) == null
clearblock::IsClear
isClearDom(clearblock) == block
isClear(clearblock) == true
end
K => @join begin
(block, underblock, null)::Block
end
R => @join begin
gripper::Gripper
empty::Empty
(block, underblock, null)::Block
isEmpty(empty) == null
isHolding(gripper) == block
clearunderblock::IsClear
isClearDom(clearunderblock) == underblock
isClear(clearunderblock) == true
end
l => begin
null => null
block => block
underblock => underblock
end
r => begin
null => null
block => block
underblock => underblock
end
end;unstack action applied to the initial state \(X\) 
Planning using \(\catSet{C}\) and DPO Rewriting

Existing state-space planning algorithms can be adapted to work with this planning representation (Section 6.4.4 in (Aguinaldo 2024)).
Example: ForwardPlan() executes depth-first search (DFS) to find a sequence of actions.
function ForwardPlan(world::ACSet, goal::ACSet, actions::Dict,
action_limits::Dict, action_usage::Dict,
plan::List)
# Exit criteria: goal is reached if there is a monic morphism from goal to world
if homomorphism(goal, world, monic=true) !== nothing
println("Goal reached.")
return plan
end
# Find applicable actions for the current world state
applicable = find_applicable_actions(world, actions)
# Backtrack criteria: no applicable actions
if length(applicable) <= 0
throw("No applicable actions found! Terminate path...")
end
# Iterate over all applicable actions
for action in applicable
action_name = action.first
match_morphism = action.second
# Backtrack criteria: action applied too many times
try
if action_usage[action_name] >= action_limits[action_name]
println("Abort path. Action used too many times.")
continue
end
catch
# Initialize action usage if it doesn't exist
action_usage[action_name] = 1
end
# Save current world state for backtracking
prev_world = world
selected_action = action[action_name].rule
# Apply the selected action to the current world state
try
world = rewrite(selected_action, world)
catch e
throw("Could not apply action!")
end
# Record the action and corresponding match morphism in the current plan
append!(plan, [selected_action => match_morphism])
try
# Recursively call ForwardPlan with updated world state
plan = ForwardPlan(world, goal, actions, action_limits,
action_usage, plan)
return plan
catch e
# Backtrack to previous world state if path fails
world = prev_world
pop!(plan)
println("Path failed. Try a different path.")
end
end
# If no valid plan is found, report failure
println("No plan found.")
endTransfer using Functorial Data Migration, \(\Delta_F\)
High-level Steps in Analogical Plan Transfer
- Define the Source Domain: Start by defining the ontology, \(\cat{D}_S\), and actions, \(A_S\), for the source domain, \(\textbf{D}_S\).
- Define the Planning Problem: Establish the initial and goal states, \(P_S = (I, G)\) within domain \(\textbf{D}_S\).
- Plan: Solve for a valid plan, \(\pi_S\), that solves for \(P_S\) within domain \(\textbf{D}_S\).
- Define the Target Domain Ontology: Specify the target ontology, \(\cat{D}_T\), in the new domain, \(\textbf{D}_T\).
- Align Ontologies: Create a translation map, \(F: \cat{D}_T \rightarrow \cat{D}_S\), linking the types and predicates from the target domain ontology to the source domain ontology.
- Transfer the Plan: Use the translation map to transfer the grounded plan via \(\Delta_F\), resulting in \(\pi_T\).
- Validate the Plan: Check that the end state after \(\pi_T\) contains \(\Delta_F(G)\).
Section 7.4 in (Aguinaldo 2024)
![]()
![]()
A review
Advantages and Limitations of Categorical Structure for Planning
Advantages
- Preserves ontological structure when applying actions and transferring plans
- Predictable runtime complexity w.r.t. PDDL and its extensions, e.g. typing and transitive closure constraints
- Generalized transfer for pair of domains
- Symbolic action (skill) generation

Limitations
- Reliance on advanced mathematical theory
- Higher runtime complexity for checking applicability of actions, \(O(n^k)\), w.r.t. PDDL, \(O(nk)\)
- Depends on proper (functorial) ontological alignment
- Difficulty handling structurally dissimilar domains

Section 6.6 and 7.8 in (Aguinaldo 2024)
Summary of Research Contributions
Purpose
Enable robots to reuse old task plans to solve new problems
Gap
In robot plan transfer, there is little attention given to task-level plan transfer.
Research Contributions
- Propose a conceptual framework for discussing types of task-level plan transfer, namely sequential, hierarchical, and analogical transfer
- Introduce a mathematical framework that validates each type of transfer based on symmetric monoidal categories, functors, \(\cat{C}\)-sets, DPO rewriting from category theory
- Use case studies to demonstrate effective applications of category theory to robotics and AI planning
Future Work
- Scaling studies and software tools for category theory-based planning and plan transfer
![]()
Areas of Future Work
Scaling Studies: Empirical and Theoretical
- More planning and plan transfer problems
- Scale by the size of the world state and ontology
- Scale by length of plan
- Design benchmarks, e.g. transfer accuracy
- Study functoriality of migration for certain ontology maps
A Software Tool for Category Theory-Based Planning and Transfer
- Run planners
- Automate discovery of functorial ontology alignments
- Perform analogical plan transfer
- Compose plans with other plans using sequential transfer
- Check plans satisfy abstract behavior using hierarchical transfer
Section 8.3 in (Aguinaldo 2024)
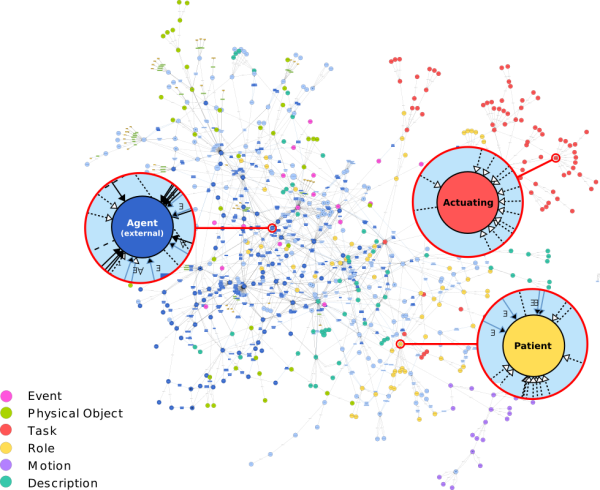
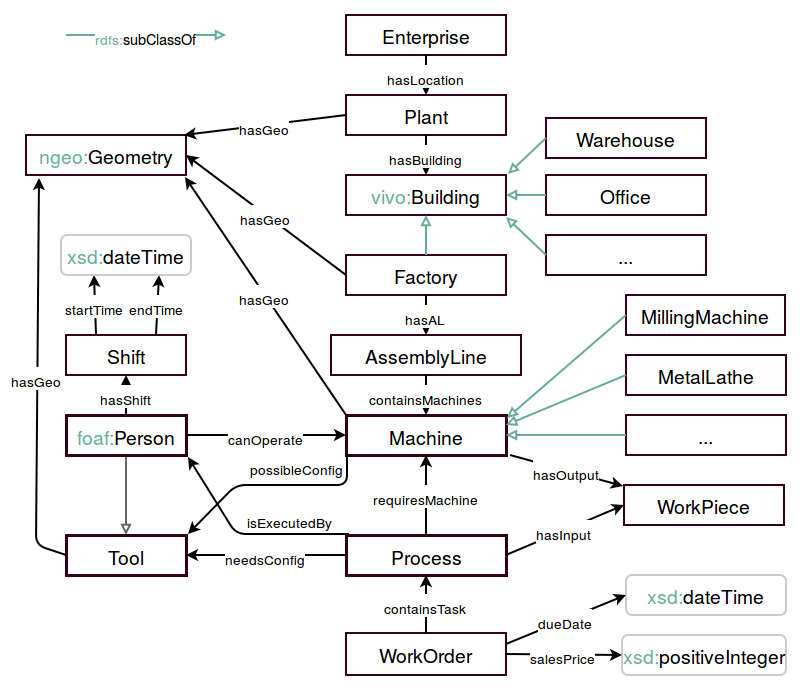
Knowrob (Tenorth and Beetz 2017) and Factory of the Future (Schäfer et al. 2021) ontologies
Summary of Research Contributions
Purpose
Enable robots to reuse old task plans to solve new problems
Gap
In robot plan transfer, there is little attention given to task-level plan transfer.
Research Contributions
- Propose a conceptual framework for discussing types of task-level plan transfer, namely sequential, hierarchical, and analogical transfer
- Introduce a mathematical framework that validates each type of transfer based on symmetric monoidal categories, functors, \(\cat{C}\)-sets, DPO rewriting from category theory
- Use case studies to demonstrate effective applications of category theory to robotics and AI planning
Future Work
- Scaling studies and software tools for category theory-based planning and plan transfer
![]()
Types of Analogies (in analogical plan transfer)

String Diagram Viewer Demo
RoboCat Demo
Video Credit: Ankit Shukla (Siemens)
Evolution of robot program reuse

Manual programming (F. Q. Brown 1967)
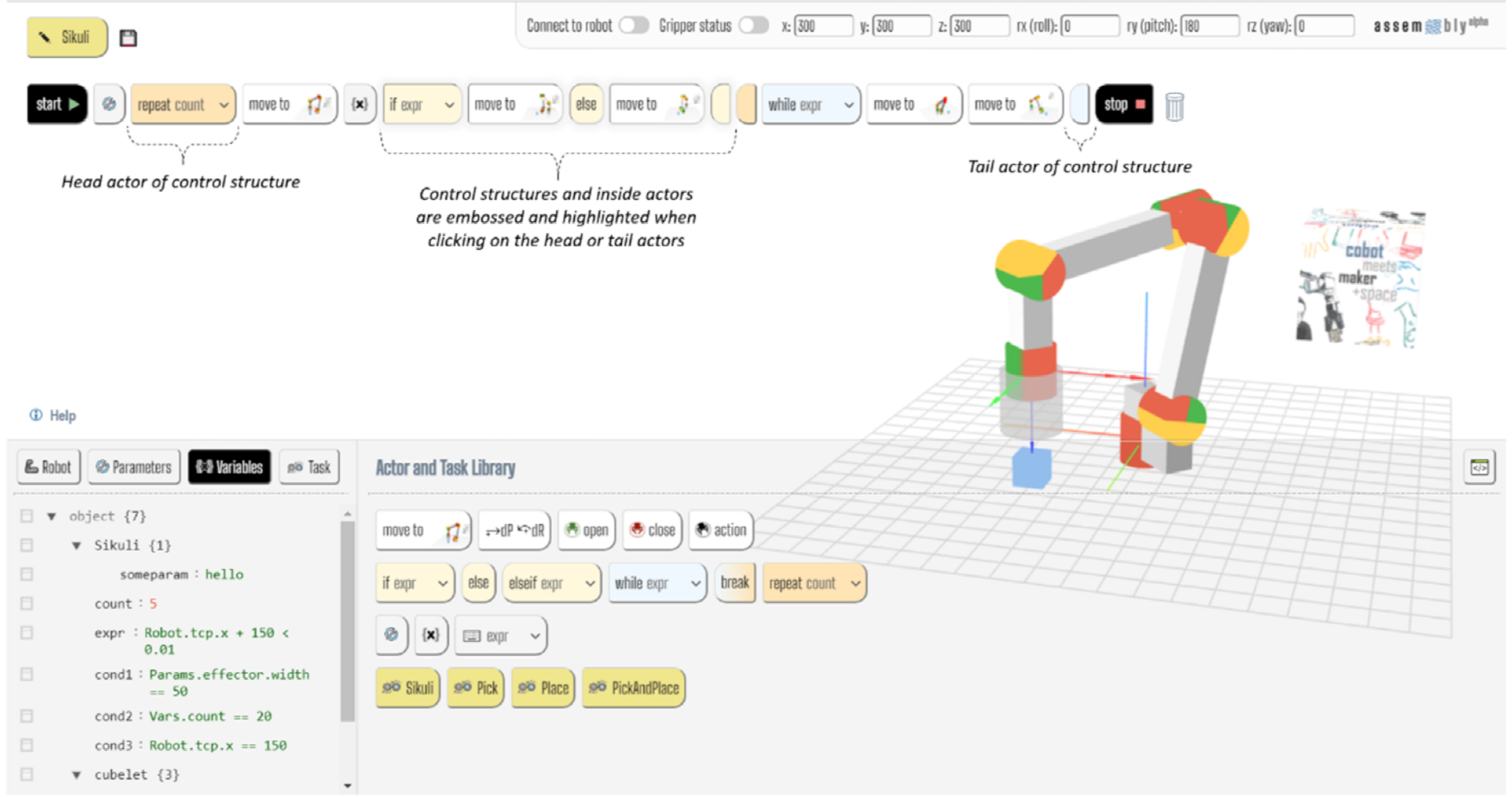
Motion primitives and skills
“Does your robot have skills?” (Bøgh et al. 2012), Assembly (Ionescu 2020), CRCL (Proctor et al. 2016)
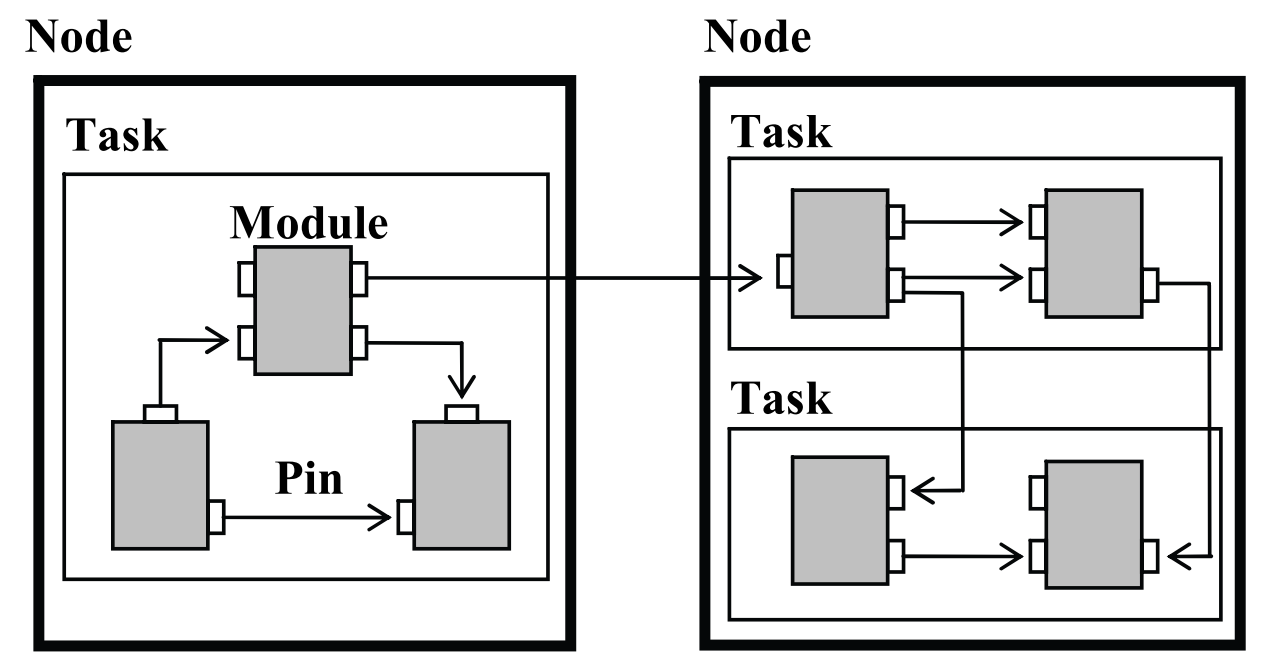
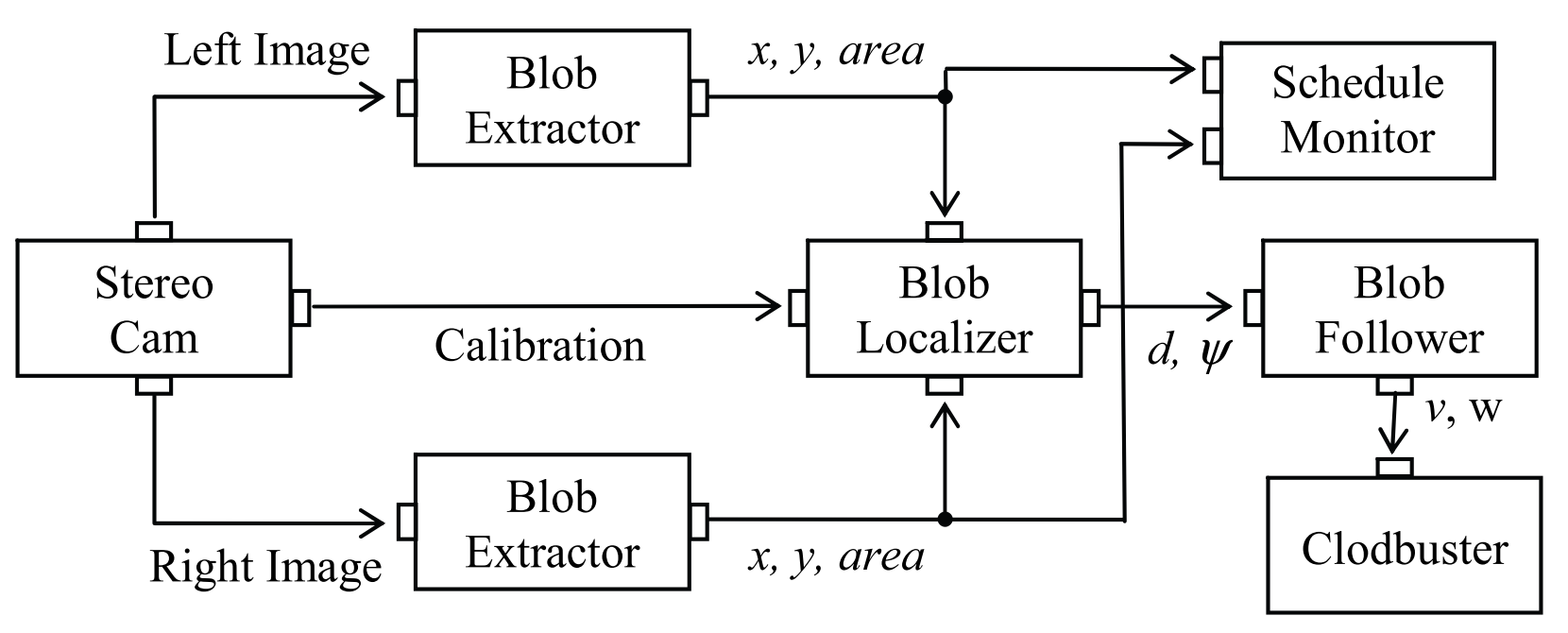
Modular architectures (Cowley, Chaimowicz, and Taylor 2006)
Middlewares (Aragão, Moreno, and Bernardino 2016), (Yang Liang 2008), (Matai et al. 2008)
![]()
Program translation (Freund et al. 2001), (Freund and Luedemann-Ravit 2002)
MontiArcAutomaton (Adam et al. 2017), (Ringert et al. 2014), AdaptPack Studio (Souza et al. 2019), (Carvalho de Souza et al. 2020)
References

Abramsky, Samson, and Bob Coecke. 2008. “Categorical Quantum Mechanics.” Handbook of Quantum Logic and Quantum Structures Vol II, 1–63. https://arxiv.org/abs/arXiv:0808.1023v1.
Adam, Kai, Katrin Olldobler, Bernhard Rumpe, and Andreas Wortmann. 2017. “Modeling Robotics Software Architectures with Modular Model Transformations.” Journal of Software Engineering for Robotics 8 (1): 3–16. file:///home/qiqi/Downloads/120-Article Text-646-1-10-20171214.pdf%0Ahttp://ieeexplore.ieee.org/document/7926535/.
Aguinaldo, Angeline. 2024. “Sequential, Hierarchical, and Analogical Plan Transfer in Robotics.” Ph.D. Dissertation, University of Maryland, College Park.
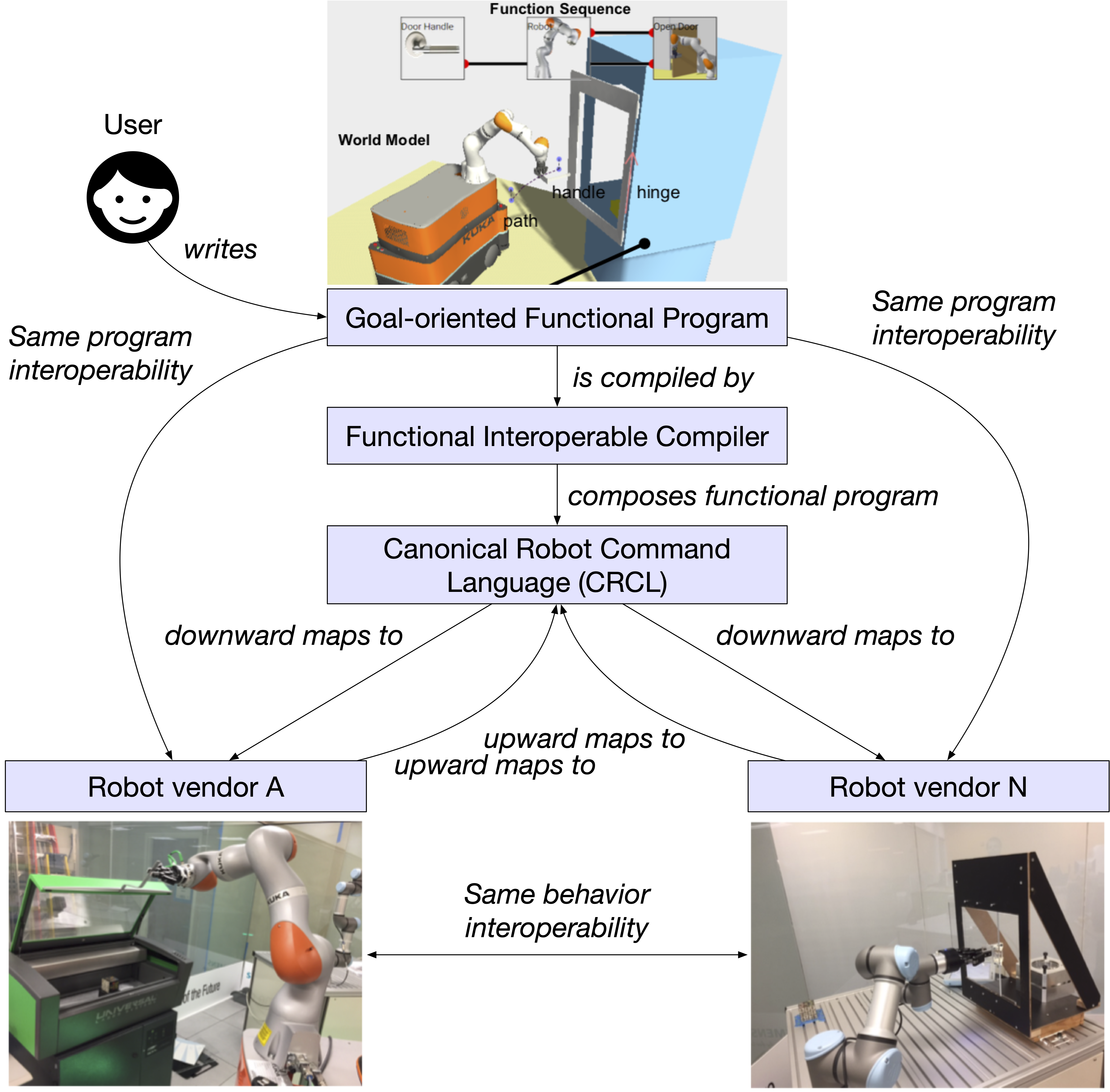
Aguinaldo, Angeline, Jacob Bunker, Blake Pollard, Ankit Shukla, Arquimedes Canedo, Gustavo Quiros, and William Regli. 2021. “RoboCat: A Category Theoretic Framework for Robotic Interoperability Using Goal-Oriented Programming.” IEEE Transactions on Automation Science and Engineering, 1–9. https://doi.org/10.1109/TASE.2021.3094055.
Aguinaldo, Angeline, Evan Patterson, James Fairbanks, William Regli, and Jaime Ruiz. 2023. “A Categorical Representation Language and Computational System for Knowledge-Based Planning.” In 2023 AAAI Fall Symposium on Unifying Representations for Robot Application Development.
Aguinaldo, Angeline, Evan Patterson, and William Regli. 2024. “Automating Transfer of Robot Task Plans Using Functorial Data Migrations.” https://arxiv.org/abs/2406.15961.
Aguinaldo, Angeline, and William Regli. 2021. “A Graphical Model-Based Representation for PDDL Plans using Category Theory.” In ICAPS 2021 Workshop XAIP. www.aaai.org.
Allen Institute for Artificial Intelligence. 2024. “AiTHOR Object Types Documentation.” https://ai2thor.allenai.org/ithor/documentation/objects/object-types.
Alnazer, Ebaa, and Ilche Georgievski. 2023. “Understanding Real-World AI Planning Domains: A Conceptual Framework.” In Service-Oriented Computing, edited by Marco Aiello, Johanna Barzen, Schahram Dustdar, and Frank Leymann, 3–23. Cham: Springer Nature Switzerland.
Aragão, Miguel, Plinio Moreno, and Alexandre Bernardino. 2016. “Middleware interoperability for robotics: A ROS-YARP framework.” Frontiers Robotics AI 3 (OCT): 1–10. https://doi.org/10.3389/frobt.2016.00064.
Bøgh, Simon, Oluf Skov Nielsen, Mikkel Rath Pedersen, Volker Krüger, and Ole Madsen. 2012. “Does Your Robot Have Skills.” In Proceedings of the 43rd International Symposium on Robotics.
Breiner, Spencer, Al Jones, and Eswaran Subrahmanian. 2016. “Categorical models for process planning.” Computers in Industry, 1–35.
Brown, Frank Q. 1967. “3,500 Pound Industrial Robot, Unimate, Pouring Coffee for a Woman at Biltmore Hotel in Los Angeles, Calif.” Photograph, Los Angeles Times Photographic Collection, University of California, Los Angeles, Library, Department of Special Collections. https://ark:/21198/zz0002vfhd.
Brown, Kristopher, Evan Patterson, Tyler Hanks, and James Fairbanks. 2023. “Computational Category-Theoretic Rewriting.” Journal of Logical and Algebraic Methods in Programming 134: 100888. https://doi.org/https://doi.org/10.1016/j.jlamp.2023.100888.
Caruana, Rich. 1997. “Multitask Learning.” Machine Learning 28. https://doi.org/10.1111/j.1468-0319.1995.tb00042.x.
Carvalho de Souza, João Pedro, André Luiz Castro, Luís F. Rocha, and Manuel F. Silva. 2020. “AdaptPack studio translator: translating offline programming to real palletizing robots.” Industrial Robot 47 (5): 713–21. https://doi.org/10.1108/IR-12-2019-0253.
Coecke, Bob, and Aleks Kissinger. 2017. “286Categorical Quantum Mechanics i: Causal Quantum Processes.” In Categories for the Working Philosopher. Oxford University Press. https://doi.org/10.1093/oso/9780198748991.003.0012.
Cowley, Anthony, Luiz Chaimowicz, and Camillo J. Taylor. 2006. “Design minimalism in robotics programming.” International Journal of Advanced Robotic Systems 3 (1): 031–36. https://doi.org/10.5772/5762.
Defense Advanced Research Projects Agency (DARPA). 2015. “DARPA Robotics Challenge.” https://www.darpa.mil/program/darpa-robotics-challenge.
Eilenberg, Samuel, and Saunders MacLane. 1945. “General Theory of Natural Equivalences.” Transactions of the American Mathematical Society 58 (2): 231. https://doi.org/10.2307/1990284.
Erol, Kutluhan, James Hendler, and Dana S. Nau. 1994. “UMCP: A Sound and Complete Procedure for Hierarchical Task-network Planning.” Aips 94: 249–54. http://www.cs.umd.edu/$\sim$nau/papers/erol1994umcp.pdf.
Evan Patterson. 2021. “Categories of diagrams in data migration and computational physics.” https://www.algebraicjulia.org/assets/slides/topos-colloquium-2021.pdf.
Fern, Alan, Sungwook Yoon, and Robert Givan. 2006. “Approximate policy iteration with a policy language bias: Solving relational markov decision processes.” Journal of Artificial Intelligence Research 25: 75–118. https://doi.org/10.1613/jair.1700.
Fikes, Richard E., and Nils J. Nilsson. 1971. “Strips: A new approach to the application of theorem proving to problem solving.” Artificial Intelligence. https://doi.org/10.1016/0004-3702(71)90010-5.
Fong, Brendan, and David I. Spivak. 2018. Seven sketches in compositionality: An invitation to applied category theory. Cambridge University Press. https://arxiv.org/abs/1803.05316.
Freund, Eckhard, Bernd Lüdemann-Ravit, Oliver Stern, and Thorsten Koch. 2001. “Creating the architecture of a translator framework for robot programming languages.” Proceedings - IEEE International Conference on Robotics and Automation 1: 187–92. https://doi.org/10.1109/ROBOT.2001.932551.
Freund, Eckhard, and Bernd Luedemann-Ravit. 2002. “A system to automate the generation of program variants for industrial robot applications.” IEEE International Conference on Intelligent Robots and Systems 2 (October): 1856–61. https://doi.org/10.1109/irds.2002.1044026.
Garrett, Caelan Reed, Rohan Chitnis, Rachel Holladay, Beomjoon Kim, Tom Silver, Leslie Pack Kaelbling, and Tomas Lozano-Perez. 2021. “Integrated Task and Motion Planning.” Annual Review of Control, Robotics, and Autonomous Systems 4: 265–93. https://doi.org/10.1146/annurev-control-091420-084139.
Gasser, Les, Kiran Lakkaraju, Sylvian Ray, and Samarth Swarup. 2005. “DARPA BAA 05-29 : Transfer Learning Issues and Potential Contributions.” Learning, no. May 2005: 1–6.
Gentner, Dedre. 1983. “Structure Mapping: A Theoretical Framework for Analogy.” Cognitive Science 7: 155–70. file://localhost/Volumes/alexvanvenrooij 1/Elektronische Artikelen/Papers/Unknown/2004-34.pdf.
Gentner, Dedre, and L. Smith. 2012. Analogical Reasoning. 2nd ed. Vol. 1. Elsevier Inc. https://doi.org/10.1016/B978-0-12-375000-6.00022-7.
Ghallab, Malik, Craig Knoblock, Drew McDermott, Ashwin Ram, Manuela Veloso, Daniel Weld, and David Wilkins. 1998. “PDDL - The Planning Domain Definition Language (Version 1.2).” Yale Center for Computational Vision; Control.
Ghallab, Malik, Dana Nau, and Paolo Traverso. 2004. Automated Planning: Theory and Practice. Morgan Kaufmann Publishers. https://doi.org/10.1016/B978-1-55860-856-6.X5000-5.
Hinton, Geoffrey, Li Deng, Dong Yu, George E. Dahl, Abdel-rahman Mohamed, Navdeep Jaitly, Andrew Senior, et al. 2012. “Deep Neural Networks for Acoustic Modeling in Speech Recognition.” IEEE Signal Processing Magazine 82. https://doi.org/10.1109/TLA.2018.8358674.
Ingrand, Félix, and Malik Ghallab. 2017. “Deliberation for autonomous robots: A survey.” Artificial Intelligence 247: 10–44. https://doi.org/10.1016/j.artint.2014.11.003.
Ionescu, Tudor B. 2020. “Leveraging Graphical User Interface Automation for Generic Robot Programming.” Robotics 2021.
Jaquier, Noémie, Michael C Welle, Andrej Gams, Kunpeng Yao, Bernardo Fichera, Aude Billard, Aleš Ude, Tamim Asfour, and Danica Kragic. 2023. “Transfer Learning in Robotics: An Upcoming Breakthrough? A Review of Promises and Challenges.” The International Journal of Robotics Research 0 (0): 02783649241273565. https://doi.org/10.1177/02783649241273565.
Joyal, André, and Ross Street. 1991. “The Geometry of Tensor Calculus, i.” Advances in Mathematics 88 (1): 55–112. https://doi.org/https://doi.org/10.1016/0001-8708(91)90003-P.
Kaelbling, Leslie Pack, and Tomás Lozano-Pérez. 2011. “Hierarchical Task and Motion Planning in the Now.” 2011 IEEE International Conference on Robotics and Automation.
Leinster, Tom. 2016. Basic Category Theory. Cambridge University Press. https://arxiv.org/pdf/1612.09375.pdf.
Liang, Yang. 2008. “A Middleware Based Control Architecture for Modular Robot Systems Iunfurthemore system as a standardized service unit which provides services.” In 2008 IEEE/ASME International Conference on Mechtronic and Embedded Systems and Applications, 327–32.
Liang, Yuwei, Weijie Li, Yue Wang, Rong Xiong, Yichao Mao, and Jiafan Zhang. 2021. “Dynamic Movement Primitive based Motion Retargeting for Dual-Arm Sign Language Motions.” Proceedings - IEEE International Conference on Robotics and Automation 2021-May (2019): 8195–8201. https://doi.org/10.1109/ICRA48506.2021.9561120.
Licardo, Josip Tomo, Mihael Domjan, and Tihomir Orehovački. 2024. “Intelligent Robotics—A Systematic Review of Emerging Technologies and Trends.” Electronics (Switzerland) 13 (3). https://doi.org/10.3390/electronics13030542.
Lozano-Perez, Tomas, Joseph L. Jones, Emmanuel Mazer, and Patrick A. O’Donnell. 1992. “Handey: a robot task planner.” Massachusetts Institute of Technology.
Malone, Bob. 2011. “George Devol: A Life Devoted to Invention, and Robots.” IEEE Spectrum. https://spectrum.ieee.org/george-devol-a-life-devoted-to-invention-and-robots.
Mansouri, Masoumeh, Federico Pecora, and Peter Schüller. 2021. “Combining Task and Motion Planning: Challenges and Guidelines.” Frontiers in Robotics and AI 8 (May): 1–12. https://doi.org/10.3389/frobt.2021.637888.
Marsden, Daniel. 2014. “Category Theory Using String Diagrams.” ArXiv, 1–60. http://arxiv.org/abs/1401.7220.
Master, Jade, E. Patterson, Shahin Yousfi, and A. Canedo. 2020. “String Diagrams for Assembly Planning.” ArXiv abs/1909.10475.
Matai, Janarbek, Young-ho Suh, Hyuongsun Kim, Kang-woo Lee, and Hyun Kim. 2008. “Integration Framework for Interoperability of Distributed and Heterogeneous Robot Middlewares.” 2008 10th International Conference on Control, Automation, Robotics and Vision, 2337–43. https://doi.org/10.1109/ICARCV.2008.4795898.
Nilsson, Nils J. 1984. “Shakey the Robot.” 323. SRI International. https://www.ai.sri.com/shakey/.
Pan, Sinno Jialin, and Qiang Yang. 2009. “A Survey on Transfer Learning.” IEEE Transactions on Knowledge and Data Engineering. https://doi.org/10.1109/IGARSS52108.2023.10281791.
Patterson, Evan, Andrew Baas, Timothy Hosgood, and James Fairbanks. 2022. “A Diagrammatic View of Differential Equations in Physics.” Mathematics in Engineering 5 (2): 1–59. https://doi.org/10.3934/mine.2023036.
Patterson, Evan, Owen Lynch, and James Fairbanks. 2021. “Categorical Data Structures for Technical Computing.” Compositionality 4 (5): 1–27. http://arxiv.org/abs/2106.04703.
Proctor, Frederick, William Shackleford, Stephen Balakirsky, Zeid Kootbally, Thomas Kramer, and Craig Schlenoff. 2016. “The Canonical Robot Command Language (CRCL).” Industrial Robot 43 (5): 495–502. https://doi.org/10.1108/IR-01-2016-0037.
Riehl, Emily. 2016. Category theory in context. Aurora: Dover Modern Math Originals. http://www.math.jhu.edu/$\sim$eriehl/context/%0Ahttps://store.doverpublications.com/048680903x.html.
Ringert, Jan Oliver, Alexander Roth, Bernhard Rumpe, and Andreas Wortmann. 2014. “Code generator composition for model-driven engineering of robotics component & connector systems.” CEUR Workshop Proceedings 1319: 66–77. https://arxiv.org/abs/1505.00904.
Schäfer, Philipp Matthias, Franz Steinmetz, Stefan Schneyer, Timo Bachmann, Thomas Eiband, Florian Samuel Lay, Abhishek Padalkar, Christoph Sürig, Freek Stulp, and Korbinian Nottensteiner. 2021. “Flexible Robotic Assembly Based on Ontological Representation of Tasks, Skills, and Resources.” Proceedings of the 18th International Conference on Principles of Knowledge Representation and Reasoning, KR 2021, 702–6. https://doi.org/10.24963/kr.2021/73.
Selinger, Peter. 2010. “A Survey of Graphical Languages for Monoidal Categories.” ArXiv, 289–355.
Souza, João Pedro, André Castro, Luís Rocha, Pedro Relvas, and Manuel F. Silva. 2019. “Converting Robot Offline Programs to Native Code Using the AdaptPack Studio Translators.” 19th IEEE International Conference on Autonomous Robot Systems and Competitions, ICARSC 2019, 1–7. https://doi.org/10.1109/ICARSC.2019.8733631.
Spivak, David I. 2021. “Functorial aggregation.” ArXiv. http://arxiv.org/abs/2111.10968.
Spivak, David I., and Robert E. Kent. 2012. “Ologs: A categorical framework for knowledge representation.” PLoS ONE 7 (1). https://doi.org/10.1371/journal.pone.0024274.
Spivak, David I, and Robert E Kent. 2011. “Ologs: a categorical framework for knowledge representation.” PLOS ONE. https://arxiv.org/pdf/1102.1889.pdf.
Taylor, Matthew E., and Peter Stone. 2009. “Transfer learning for reinforcement learning domains: A survey.” Journal of Machine Learning Research 10: 1633–85.
Tenorth, Moritz, and Michael Beetz. 2017. “Representations for robot knowledge in the KNOWROB framework.” Artificial Intelligence 247: 151–69. https://doi.org/10.1016/j.artint.2015.05.010.
Wilkins, D. E., and M. DesJardins. 2001. “A call for knowledge-based planning.” AI Magazine 22 (1): 99–115.